
V terénu výcvikového prostoru Březina se rozvážně pohybuje autonomní vozidlo Taros. Jde o zástupce první generace tohoto stroje, které se mezitím ve svém vývoji výrazně technologicky posunul směrem k zařízení, které má být v budoucnu schopno poskytnout vojákům operační podporu. Aby se tak mohlo stát, musí se naučit pohybovat v terénu jak podle mapy, tak samostatně na základě analýzy prostředí.
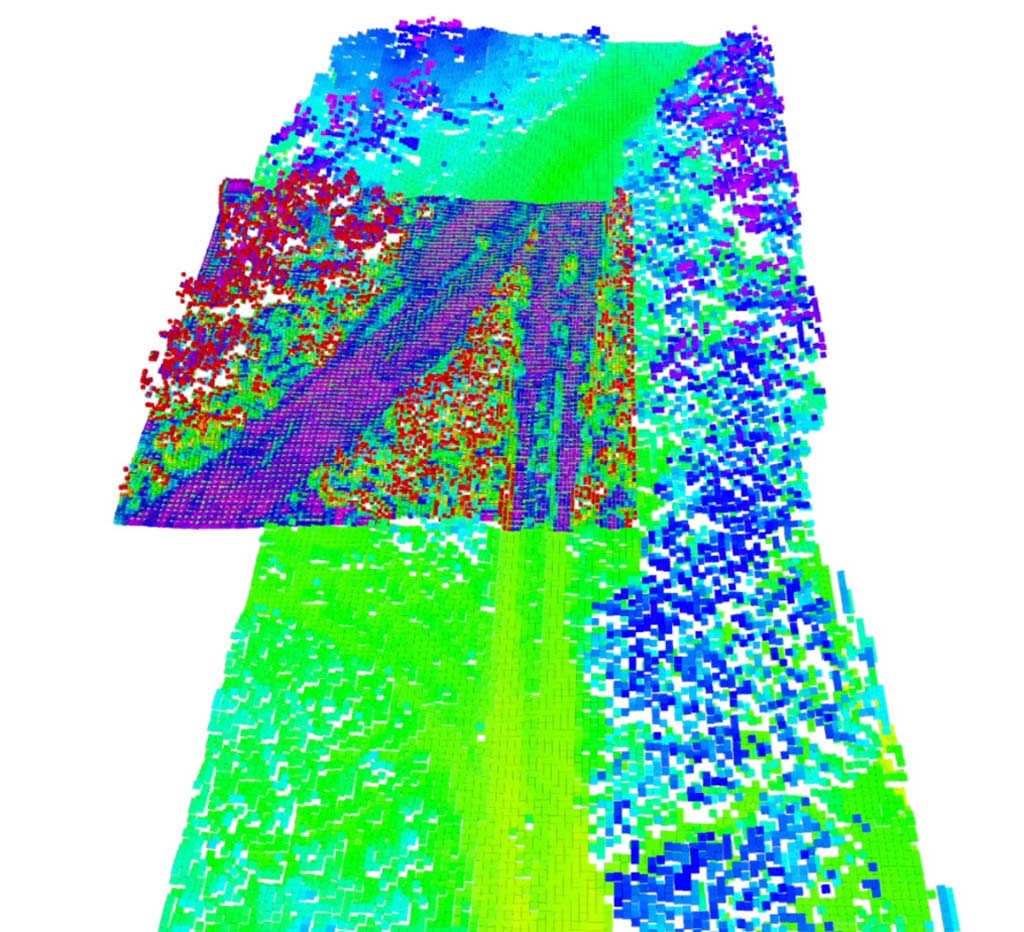
Nejpodstatnější představu o svém okolí si stroj vytvoří pomocí 3D laserového skeneru Lidar. „Na mnoho věcí jsou laserové senzory dostatečné, ale na některé aspekty ne. Třeba takovy trs trávy uprostřed cesty vám může dělat problémy,“ nastiňuje podstatu řešené problematiky Ing. Roman Adámek z Katedry vojenské robotiky. Na zkušebním vozidle jsou proto umístěny dvě multispektrální kamery, které zaznamenávají obraz v několika pásmech elektromagnetického spektra, mimo jiné také na vlnové délce přibližně 850 nm. Právě takové elektromagnetické vlny jsou odráženy chlorofylem. „Během podzimního testování jsou sbírány datasety z různých typů porostů, ať už jsou jehličnaté, listnaté, nebo jde o traviny. Následně vyhodnotíme, které senzorické informace jsou nejpodstatnější, které kamery má smysl používat a které ne,“ doplňuje inženýr Adámek. Podzimní sběr dat zároveň zachycuje i proměnu krajiny, kdy původně zelené listí žloutne a nakonec opadá.





Systémům autonomního řízení vozidel se ve světě věnuje dlouhá řada firem. Většina z nich se však zaměřuje na běžná vozidla, která se pohybují na komunikacích k tomu určených a přesně zachycených v mapách. Vojenské roboty je však třeba naučit pohybovat se i v nepopsaném terénu, kde se stroj musí zorientovat a rozhodovat podle místních podmínek. Právě probíhající výzkum má otestovat vyvíjený autonomní systém vozidla a vybrat senzory, které stroji pro toto rozhodování zajistí relevantní data.
Autor: Viktor Sliva


