
Příslušníci Katedry vševojskové taktiky Fakulty vojenského leadershipu a příslušníci Katedry vojenské robotiky Fakulty vojenských technologií Univerzity obrany spolu s kolegy z Fakulty elektrotechnické ČVUT Praha provedli na přelomu října a listopadu 2023 ve VVP Březina terénní testy autonomní navigace bezosádkového systému Taros Furbo. Testů se účastnili také příslušníci 102. průzkumného praporu a 43. výsadkového pluku.

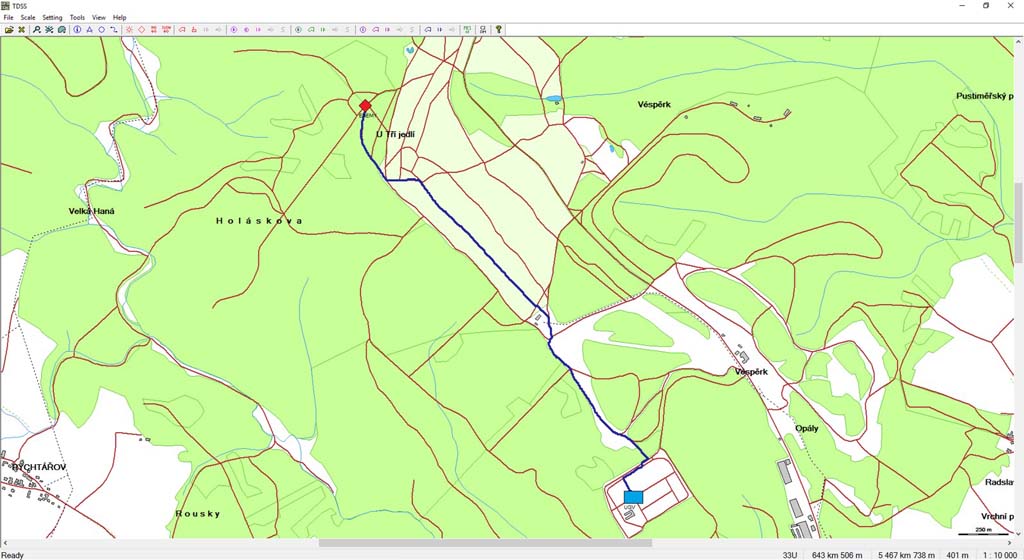

Na základě výpočtů globální trasy přesunu vozidla a s využitím na UO vyvíjeného softwaru Tactical Decision Support System byly testovány modely lokální navigace vozidla, a to prostřednictvím dvou laserových radarů (LIDAR) umístěných na korbě. Současně byla během testů shromažďována data z multispektrálních, termo a RGB kamer, za účelem nalezení vhodné kombinace senzorů, která by umožnila nejen sestavit mapu struktury prostředí, ale také doplnit tuto strukturu o její charakteristiku. Řídicí systém autonomního vozidla tedy bude schopen rozlišit překážky tvořené vegetací od umělých a jiných přírodních překážek. Zároveň byla v terénu testována možnost bezdrátového přenosu dat s využitím vysokorychlostních 5G sítí.
Zpracování takového množství dat by tak prováděla skupina matematických algoritmických modelů, které umožní robotickým systémům autonomní navigaci například při průzkumu kontaminovaných anebo aktivitou nepřítele vysoce ohrožených prostorů.
Autoři/foto: Jan Nohel, Roman Adámek, Dana Křišťálová


